实战 | 详解Apollo 换道
创始人
2025-07-05 21:00:50
0次
本文经自动驾驶之心公众号授权转载,转载请联系出处。
1.介绍
1.1. 换道的功能
简单地说, 换道的作用就是从待选地参考线中选择其中一个参考线, 供 Planning 后续模块进行使用.
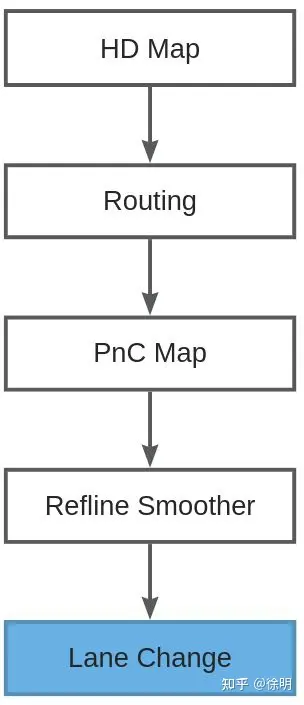
需要说明的是, Apollo 所开源出的换道代码经过了过多的删减, 只有一个简单的框架. 有很多功能, 比如主动换道, 由于障碍物产生的被动换道, 较为完整的状态机, 换道窗口和 Gap 的选择等等功能都是缺失的. 本技术文章也只展现现有框架上的内容. 关于其他的换道功能请期待后续的内容.
1.2. 换道状态机
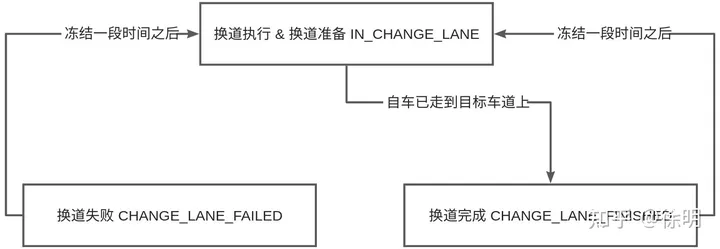
Apollo 当前的换道状态机如下:
对状态机有一下几点值得注意:
- 这里的IN_CHANGE_LANE同时包含了换道执行和换道准备两个阶段. 正常情况下应该加以区分. Apollo 采取的是先切换参考线后执行换道动作的方法, 也有友商会采用先执行换道动作在切换参考线的方法(好处是切换参考线的那一帧, 自车的横向距离接近于 0).
- 当前代码中并没有体现出什么时候会换道失败. 同样有理由相信是由于删除相关代码导致的.
- 完整的换道状态应该至少包含: 换道准备, 换道执行, 换道保持, 换道取消, 换道完成等状态.
2. 代码解析
2.1. 整体流程
相关代码所在路径: modules/planning/tasks/deciders/lane_change_decider/http://lane_change_decider.cc
- 处理
reference_line_info为空的异常情况. - 如果配置了强制换道
reckless_change_lane为true, 则直接更新 Reference Line. - 获取上一帧的换道状态
prev_status, 刚进入程序时, 可能prev_status没有状态信息(!prev_status->has_status()), 此时直接认为处于换道完成状态. - 如果
reference_line_info的数量为 1(即has_change_lane为false), 说明自车处在巡迹状态, 自车当前所在的车道拥有唯一的车道线, 周围没有可变车道, 所以直接更新换道状态即可. - 切换换道的状态机
- 上一帧处在换道状态
ChangeLaneStatus::IN_CHANGE_LANE: 如果上一帧自车所在的 Lane 和这一帧所在的 Lane 相同, 说明自车还在往目标车道上走. 反之如果上一帧自车所在的 Lane 和这一帧所在的 Lane 不同, 说明自车已经在目标车道上了, 切换已经完成. - 上一帧处在换道失败状态
ChangeLaneStatus::CHANGE_LANE_FAILED: 如果换道失败, 则冻结状态一段时间, 然后切换到正在换道状态, 为下一次换道做准备. - 上一帧处在换道完成状态
ChangeLaneStatus::CHANGE_LANE_FINISHED: 换道成功后同样冻结一段时间, 然后切换到正在换道状态, 为下一次换道做准备. 这里冻结时间是为了避免频繁换道.
2.2. 安全检查
IsClearToChangeLane判断换道是否安全.
- 本安全判断方法不考虑虚拟障碍物(Virtual Obstacles)和静态障碍物(Static Obstacles).
- 计算动态障碍物在 Reference Line 上面的投影. 投影的几何意义如下图所示:
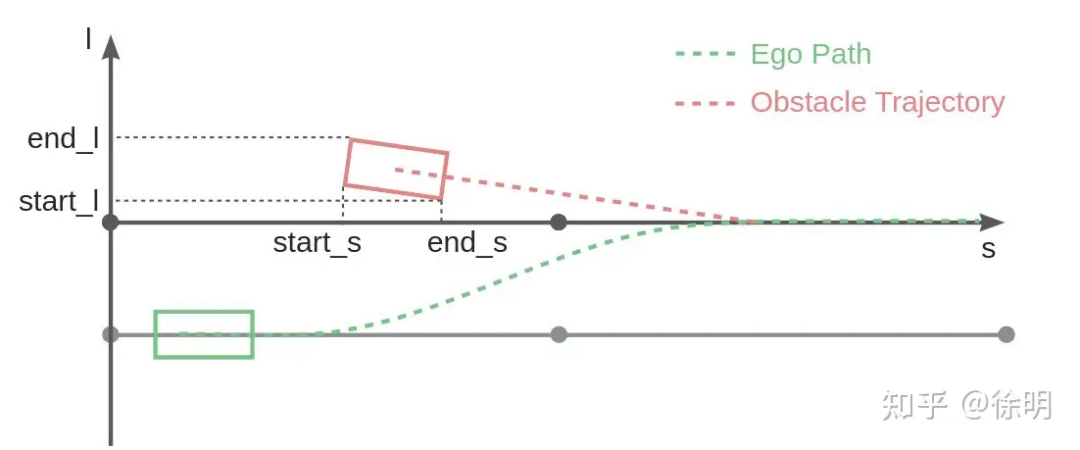
- 如果自车正在换道
IsChangeLanePath, 利用上面计算的投影关系来忽略目标参考线的车道之外的障碍物. - 判断障碍物的行驶方向是否和自车相同
same_direction. 根据障碍物与自车的行驶方向的关系和速度关系分别计算前向安全距离和后向安全距离. - 如果自车和障碍物之间的距离大于上面计算的安全距离, 则认为可以安全换道的.
HysteresisFilter是一种 Open Close 逻辑, 目的是增加安全判断结果的稳定性(上一帧判断结果认为是安全的, 那么这一帧就更倾向于给出是安全的判断, 反之亦然).
2.3. 更新 Reference Line
LaneChangeDecider::PrioritizeChangeLane
- 输入:
is_prioritize_change_lane. 如果is_prioritize_change_lane为true, 则找自车要切换的目标参考线. 反之如果is_prioritize_change_lane为false, 则找自车当前位置所在的 Lane 所在的参考线. reference_line_info->splice(reference_line_info->begin(),*reference_line_info, iter);将步骤 1 找到的iter所指向的参考线放在链表的最前面. 由于 Planning 后续模块使用的都是reference_line_info().front(), 所以链表的最前面就表示当帧就是使用的参考线.splice的使用详细说明见C++ 基础.- 输出:
ReferenceLineInfo链表.

原文链接:https://mp.weixin.qq.com/s/IQkBV8iadaU4Qy70F3Xs3Q
相关内容
热门资讯
如何允许远程连接到MySQL数...
[[277004]]【51CTO.com快译】默认情况下,MySQL服务器仅侦听来自localhos...
如何利用交换机和端口设置来管理...
在网络管理中,总是有些人让管理员头疼。下面我们就将介绍一下一个网管员利用交换机以及端口设置等来进行D...
施耐德电气数据中心整体解决方案...
近日,全球能效管理专家施耐德电气正式启动大型体验活动“能效中国行——2012卡车巡展”,作为该活动的...
20个非常棒的扁平设计免费资源
Apple设备的平面图标PSD免费平板UI 平板UI套件24平图标Freen平板UI套件PSD径向平...
德国电信门户网站可实时显示全球...
德国电信周三推出一个门户网站,直观地实时提供其安装在全球各地的传感器网络检测到的网络攻击状况。该网站...
为啥国人偏爱 Mybatis,...
关于 SQL 和 ORM 的争论,永远都不会终止,我也一直在思考这个问题。昨天又跟群里的小伙伴进行...
《非诚勿扰》红人闫凤娇被曝厕所...
【51CTO.com 综合消息360安全专家提醒说,“闫凤娇”、“非诚勿扰”已经被黑客盯上成为了“木...
2012年第四季度互联网状况报...
[[71653]] 北京时间4月25日消息,据国外媒体报道,全球知名的云平台公司Akamai Te...